Raimund Kalinowski
Unternehmensberatung
und Sachverständigenbüro
|
[Anm.:
(falls Sie auf diese Seite direkt durch einen link einer Suchmaschine
gekommen sein sollten), der Verfasser lädt Sie zum stöbern ein und freut sich über Rückmeldungen - bitte beachten Sie die Hinweise zum copyright unter Kontakt] Schwingende Regelsysteme vermeiden Einfache Maßnahmen, um die zu erwartende Regelgüte entscheidend zu verbessern. Sehr hochwertige, vermeintlich intelligente Software-PID-Regler sind in jeder modernen Speicherprogrammierbaren Steuerung [SPS] enthalten, sodass sie häufig sorglos, in großer Stückzahl verwendet werden. Wenn mehrere Regelkreise in einer Anlage aktiv sind, beeinflussen sie sich gewöhnlich gegenseitig, was grundsätzlich in voller Absicht geschieht. Damit diese wechselseitige Beeinflussung nicht zu einem instabilen Regelverhalten führt, ist es hilfreich einige relativ einfache Werkzeuge zu kennen, die verhindern, dass Regelkreise sich gegenseitig verstärken und dadurch das gesamte Regelsystem schwingt; von einer dynamischen Sollwertanpassung über Step-Regler oder errechneten indirekten Sollwerten, stehen neben der standardmäßigen Parametrierung weitere Möglichkeiten zur Verfügung, die Regelgüte drastisch zu erhöhen. Jeder der ein modernes Auto fährt gerät in den von der EU verordneten Genuss diverser Assistenten wie: Notbremsassistent, aktiver Spurhalteassistent, intelligenter Geschwindigkeitsassistent, Müdigkeitserkennung und Rückfahrassistent. Da weitere „intelligente“ Systeme in der Herstellung kaum Mehrkosten verursachen, werden sie von den Herstellern gerne aufpreispflichtig angeboten. Der ADAC fordert: „Sicherheitsassistenten sollten keiner Aufpreispolitik unterliegen. Verfügbare Assistenten, die zur Sicherheit im Straßenverkehr und für die Insassen beitragen, gehören in den Serienumfang.“ Die Begeisterung des normalen Autofahrers währt hingegen nur kurz. Da die Zuverlässigkeit der Systeme selbst geringen Ansprüchen nicht genügt, werden sie häufig abgeschaltet. Sie als „intelligent“ zu bezeichnen und Funktionen aus dem Bereich Science-Fiction gesetzlich vorzuschreiben, grenzt an Größenwahn. Wenn man die Entwicklungskosten eines Autos betrachtet, sollten doch diese „Assistenten“ eigentlich perfekt optimiert worden sein. Würde man einen Leerflascheninspektor akzeptieren, der pro korrekt ausgeschleuster Flasche über 1.000 fehlerfreie Flaschen aussortiert? Wenn die Autoindustrie es nicht schafft, trotz erheblicher Ressourcen und gesetzlicher Vorgaben eine (nahezu) fehlerfrei funktionierende Verkehrszeichenerkennung zu realisieren, darf man dann erwarten, dass „intelligente, sich selbst-optimierende“ Regler so funktionieren wie die Bezeichnung es suggeriert? Software PID-Regler Früher waren Regler eigene (Hardware-)Komponenten, die sorgfältig von einem Mess- und Regelungstechniker in Abstimmung mit dem Anlagenplaner ausgewählt wurden. Ende der 1970-er Jahre kostete ein solcher elektronischer Regler – im eigenen Gehäuse zum Einbau in eine Schalttafel – über 2.000 DM. Heute ist ein Regler ein Stück Software, das zusammen mit der Schalt- und Steueranlage erworben wird und dessen Preis verschwindend gering ist, sodass beim Einsatz und der Auswahl von Reglern kein Aufwand mehr getrieben wird und stetig regelnde PID-Regler in jeder beliebigen Menge eingesetzt werden. Darf man bei diesem Massenprodukt einen Regler mit überragenden Regeleigenschaften erwarten, der tatsächlich mit einprogrammierter KI ständig dazu lernt und sich selbst optimiert oder sind das reißerische Werbeaussagen? Bei der Parametrierung steht meist kein Mess- und Regelungstechniker zur Verfügung, sondern ein Programmierer erledigt die Parametrierung und Optimierung im Rahmen der Inbetriebnahme gleich mit. Manche Inbetriebnehmer verzichten auch auf jede Einstellung und vertrauen auf die Intelligenz und Selbstoptimierung der Systeme. PID-Regler werden in den meisten Fällen als PI-Regler parametriert. Möglicherweise funktioniert die künstliche Intelligenz in anderen Branchen und bei anderen Aufgaben so wie versprochen. Möglicherweise gibt es auch genormte Aufgaben, für die diese Regler optimiert wurden? Alternative Regler Ist es sinnvoll bevorzugt Stetig-Regler einzusetzen, nur weil sie praktisch nichts kosten und als sehr hochwertig gelten? Neben den PID-Stetigreglern wurden früher regelmäßig Auf-Neutral-Zu-Regler mit PI(D)-ähnlichem Verhalten eingesetzt. Für zahlreiche Regelaufgaben wurden auch einfache Step-Regler oder Regler ohne Hilfsenergie verwendet. Auch wenn diese nicht über künstliche Intelligenz verfügen und nicht selbstoptimierend sind, sind sie häufig – auch heute noch – den „modernen“ Systemen deutlich überlegen.
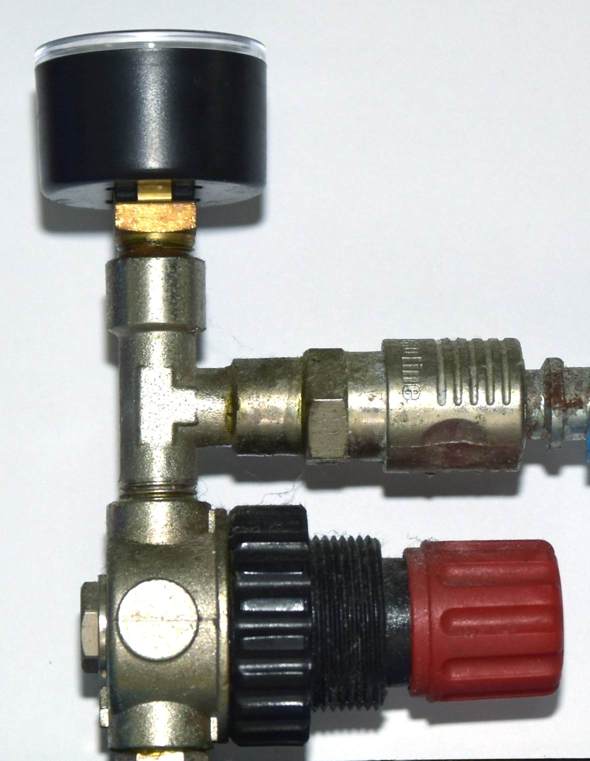
Typische Druckminderer sind Regler ohne Hilfsenergie Wenn man eine Dampfleitung installiert, wird man bewusst Festlager und für die kontrollierte Ausdehnung teurere Loslager einplanen. Wenn man ausschließlich teurere Loslager einbaut, wird das Gesamtergebnis unbefriedigend sein. Analog zu den Reglern bedeutet das, stetig regelnde Stellorgane sind zwar eigentlich „wertvoller“, aber erzeugen manchmal auch ein unkontrolliertes und inakzeptables Gesamtergebnis. Stellglieder – Regelkreise Typische Stellventile weisen einen Sitz und einen Regelkegel mit entweder linearem oder gleichprozentigem Regelverhalten auf. Für einfache Regelaufgaben werden auch z.B. Schieber oder Scheibenventile eingesetzt. Auch schaltbare Blenden (Scheibenventile mit einer Bohrung in der Scheibe) haben für bestimmte Aufgaben eine Berechtigung. Pumpen werden in der Drehzahl geregelt. Je mehr gleichartige Bauteile verwendet werden, desto höher ist die Wahrscheinlichkeit, dass sie sich gegenseitig zum Schwingen anregen. Zu jedem geregelten Stellglied gehört eine Regelgröße. Dies können übliche Messgrößen wie Temperatur, Druck oder Durchfluss, aber auch z.B. der Stellwert eines Stellglieds oder das Ergebnis einer Berechnung aus mehreren Messwerten sein. Wenn die Änderung des Stellwerts unmittelbar einen Einfluss auf die Regelgröße hat, spricht man von einem schnellen Regelkreis. Bei langsamen Regelkreisen kann es sehr lange dauern, bis die Regelgröße sich ändert. Typische Beispiele hierfür sind z.B. die Temperatur in einem zu kühlenden großen Tank oder die Ablufttemperatur einer Trocknungsanlage. Langsame Regelkreise mit stetig regelnden PID-Reglern zu parametrieren ist schwierig. Deshalb sollte immer versucht werden, Regelgrößen zu verwenden, die unmittelbar auf eine Änderung des Stellwertes reagieren.
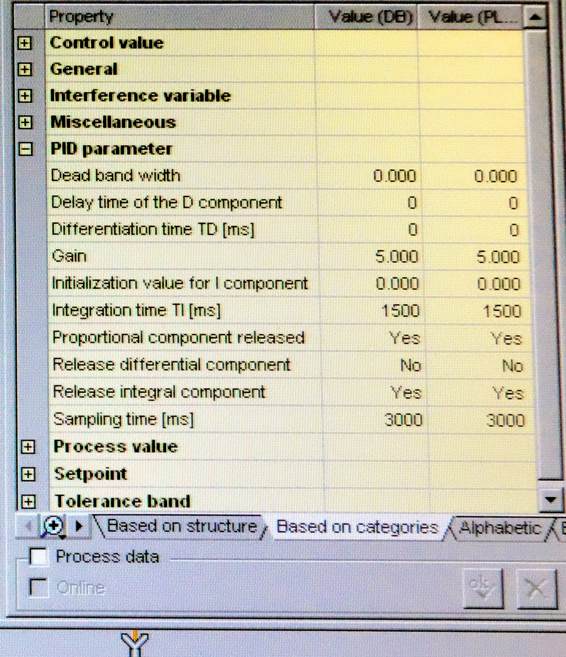
Parametrierung eines verbreiteten Leitsystems. Wäre es zu einfach „P“, „I“ und „D“ zu schreiben, um die wichtigen Einstellungsparameter sofort zu erkennen? Beispiel-Regelkreis Als Beispiel dient die Heizung eines Raums mit einem Warmwasserheizkörper, so wie man ihn in zahlreichen Büros oder Wohnungen findet. Eine Pumpe zirkuliert das Wasser durch den Heizkörper und das Heizgerät, das aus einem Gasbrenner und einem Wärmeübertrager besteht. Eine einfache Zweipunktregelung würde die Pumpe konstant mit fester Drehzahl laufen lassen und den Brenner starten, wenn die Solltemperatur unterschritten wird und ihn abschalten, wenn die Soll-Raumtemperatur erreicht wird. Da als Ergebnis die Raumtemperatur dabei immer über- oder unterschritten würde, installiert man zur Verbesserung der Raumtemperaturregelung seit Jahrzehnten einen Heizkörperthermostaten, d.h. ein Stellventil ohne Hilfsenergie mit integriertem Temperatur-Messwertaufnehmer. Da die Pumpe immer mit maximaler Leistung läuft und der Druck sich ändert, wenn in einem anderen Raum ein Heizkörperventil öffnet oder schließt, bekommt sie eine Drehzahlregelung, um den Druck vor den Thermostatventilen konstant zu halten und dadurch die Regelgüte zu verbessern und den Stromverbrauch zu senken. Da der zu heizende Raum die erzeugte Wärme des Brenners – der immer mit maximaler Leistung läuft – nicht abnehmen kann und deshalb regelmäßig abschaltet, wird nun auch die Brennerleistung geregelt. Störgrößen, wie z.B. mehrere Räume mit eigenen Regelungen, die Fensterlüftung oder der Wärmeeintrag durch Personen werden bei der folgenden Betrachtung ausgeblendet. Es wird angenommen, dass das System zum Startzeitpunkt perfekt einreguliert und die benötigte Energiemenge im Raum konstant ist. Ferner wird angenommen, dass statt des Thermostatheizkörperventils ein aktives Stellventil mit Temperaturaufnehmer im Raum und stetig regelndem PID-Regler installiert sind. Ein solcher PID-Regler, der keine Abweichung zur Regelgröße feststellt, wird trotzdem regeln und dadurch eine Abweichung herstellen. Wenn nun das Stellventil öffnet, fällt der Druck ab und der Volumenstrom steigt an. Die Austrittstemperatur des Brenner-Wärmeübertragers fällt durch den höheren Volumenstrom ab. Die Druckregelung der Pumpe reagiert und erhöht die Drehzahl der Pumpe, der Brenner erhöht ebenfalls die Leistung, um die sinkende Temperatur am Wärmeübertrageraustritt auszugleichen. Durch den höheren Volumenstrom durch den Heizkörper erhöht sich auch die Rücklauftemperatur und zeitlich versetzt die Vorlauftemperatur des Brenner-Wärmeübertragers. Da der Druck in der Rohrleitung durch die Drehzahlerhöhung nun wieder ansteigt, nimmt der Volumenstrom weiter zu, der Brenner reagiert auf die stärker fallende Temperatur am Wärmeübertrageraustritt und erhöht nochmal die Brennerleistung, das Stellventil reduziert nun den Durchfluss durch den Heizkörper, der Druck steigt deshalb weiter an, weshalb die Pumpenleistung reduziert wird, inzwischen erreicht der wärmere Rücklauf den Brenner-Wärmeübertrager, bei konstanter Brennerleistung steigt nun die Vorlauftemperatur an, und man erkennt, dass relativ einfache System schwingt. Gegenüber diesem hypothetischen System wird real ein Thermostatventil verbaut. Die Pumpe und der Brenner werden zudem sinnvollerweise nicht durch PID-Regler gesteuert, sodass dieses System vernachlässigbar schwingt, weil die Bauteile und die Regelgüte an die Regelaufgabe angepasst wurden. Gesamtbetrachtung Einzelne „Probleme“ dürfen nicht getrennt betrachtet werden und es darf nicht versucht werden zusätzliche Regelkreise aufzubauen ohne die Konsequenzen durchdacht zu haben. Vor Jahren wurde z.B. eine Kurzzeiterhitzungsanlage [KZE] ausgeliefert, bei der 27 Regelkreise mit stetig regelnden PID-Reglern sich gegenseitig beeinflussten. Die sehr hohen Anforderungen des Kunden bezüglich der Temperaturkonstanz am Ende des Heißhalters wollte man durch die große Anzahl der Regelkreise erfüllen und erreichte dabei das Gegenteil. In der Praxis sind Programmierer kaum in der Lage einen Regler optimal einzustellen. Man sollte sich nicht scheuen einen geeigneten Verfahrenstechniker oder erfahrenen Mess- und Regelungstechniker mit der Regleroptimierung zu beauftragen. Grundsätzlich gilt: Kleine Sollwertänderungen sind leichter zu regeln und je schneller die Messgröße auf die Veränderung des Stellglieds reagiert, desto einfacher ist die Optimierung der Reglerparameter; um dies zu erreichen können Programmänderungen und eine Modifikation der Messwertaufnehmer notwendig sein. Indirekte Messwertaufnahme Der Sollwert einer KZE ist in der Regel die Temperatur am Ende des Heißhalters. Es ist aber nicht zweckmäßig diese Temperatur für den Sollwert der Temperaturregelung zu verwenden. Die Temperatur-Abweichung zwischen Heißhaltereintritt und -austritt ist je nach Dämmung und Raumtemperatur über einen längeren Zeitraum nahezu konstant. Wenn man als Sollwert die Temperatur am Eintritt des Heißhalters plus des Temperaturverlustes im Heißhalter wählt, liegt das Messergebnis um den Betrag der Heißhaltezeit (meist mindestens 30 s) früher vor. Trotzdem ist die Regelung noch relativ träge, da in der Regel ein Sekundärkreislauf für die Erhitzung verwendet wird. Um diesem Problem zu begegnen, muss die Sollwertänderung sehr langsam erfolgen. Da die Sollwertänderung vom Produkt-Durchfluss und der Produktdurchfluss vom Stand im Puffertank bzw. der Abnahme des Füllers abhängen, können diese Daten relativ einfach zu einem sich langsam ändernden Volumenstrom-Sollwert verrechnet werden.
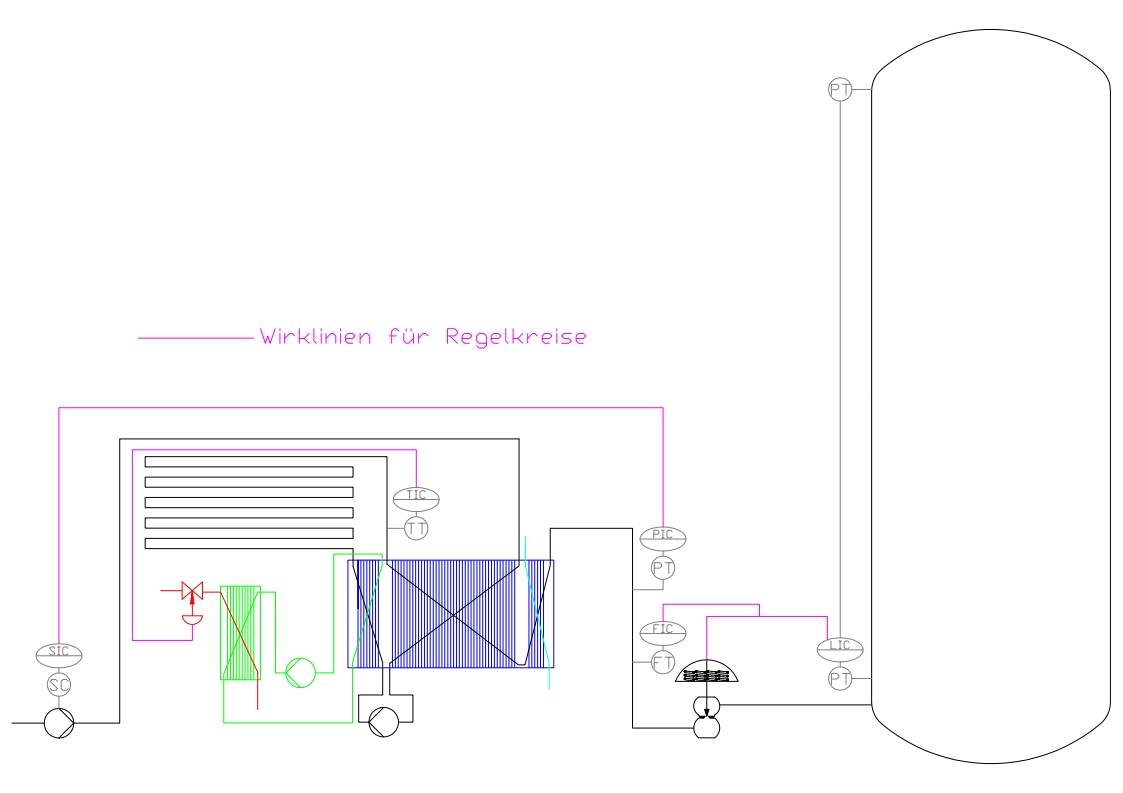
KZE mit träger Temperaturregelung durch Sekundärkreislauf und eigentlich falscher Temperaturmessung am Ende des Heißhalters, aber schneller und ruhiger Durchflussleistungsregelung in Abhängigkeit vom Füllstand des Puffertanks Statt einer Temperatur (z.B. in einer Trocknungsanlage oder einem zu kühlenden Tank) als direkte Sollgröße zu verwenden, kann auch die Energiezufuhr sehr schnell gemessen bzw. errechnet und als Sollwert zur Regelung des Stellglieds verwendet werden. Bei einer Trocknungsanlage können z.B. die Stromaufnahme des Ventilators zur Bestimmung des Massenstroms sowie Luftfeuchte und Temperatur der Zu- und Abluft, die Brennstoffmenge und die zu entfernende Wassermenge bestimmt werden. Bei einem Tank werden der Energieinhalt des Vor- und Rücklaufs bestimmt und mit der spezifischen Wärmekapazität des Tankinhalts, der Solltemperatur und dem Wärmeeintrag verrechnet. Die unvermeidbaren Abweichungen zur Solltemperatur werden durch einen automatisch ermittelten Offset berücksichtigt. In Brauereien mit offener Gärung war es jahrzehntelang typisch, dass der erfahrene Gärführer die Kühlung nach den Strömungsgeräuschen im Stellventil in Abhängigkeit zum visuell ermittelten Gärstadium einstellte.
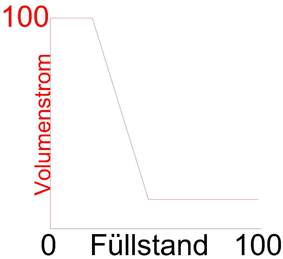
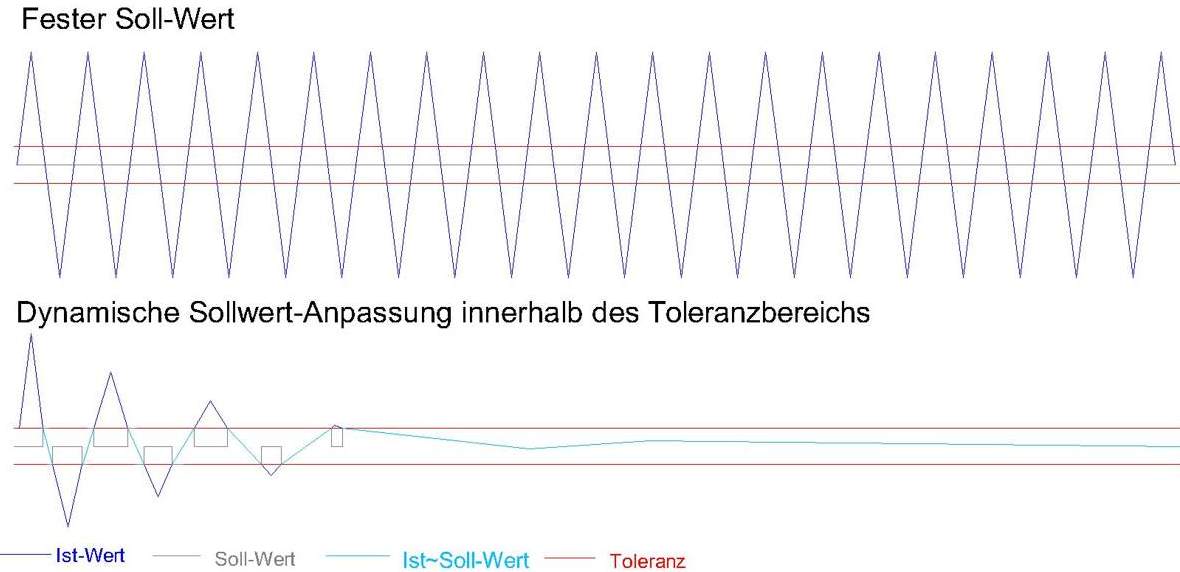
Aus dem Füllstand errechneter Soll-Volumenstrom zur Puffertankbefüllung Step-Regler und fester Sollwert Wenn Druckhaltung und Volumenstrom (z.B. bei einer KZE) über die Kombination drehzahlgeregelte Pumpe und Stellventil kontrolliert werden, kann z.B. die Pumpe – abhängig von den erwarteten Produktionsparametern – auf eine feste Drehzahl eingestellt werden. Alternativ wird ein Step-Regler verwendet, der die Drehzahl der Pumpe in Abhängigkeit des Stellwerts des Ventils anpasst. Wenn z.B. der Stellwert des Ventils sich zwischen 20% und 80% befindet, wird die Drehzahl nicht verändert; wenn der Stellwert unter 20% absinkt wird die Drehzahl um einen festen oder prozentualen Betrag erhöht, wenn nach einer kurzen Verzögerungszeit der Stellwert noch immer unter 20% ist, erfolgt der nächste ’step’. Bei Stellwerten oberhalb von 80% wird die Drehzahl entsprechend schrittweise reduziert. Dieser Step-Regler ist im Prinzip ein Auf-Neutral-Zu-Regler mit einem Proportional[P]-Regelverhalten und dem Sollwert 50% mit einer Toleranz von ±30% absolut. Dynamischer Sollwertgeber Manchmal sind stetig-regelnde PI- oder PID-Regler die geeignetste Reglerlösung. Wenn trotz aller Sorgfalt bei der Projektierung und Umsetzung inkl. optimaler Parametrierung sich Regler gegenseitig beeinflussen und dabei zunehmend schwingen, muss das Schwingen unterbunden werden. Die naheliegende Lösung, den Regler träger einzustellen ist häufig kontraproduktiv. Eine einfache und sehr effektive Lösung ist es, den Sollwert einzelner Regelkreise dynamisch anzupassen. Beruhigung eines schwingenden Reglers. Während der Ist-Wert sich innerhalb der Toleranz befindet wird die Differenz zwischen Ist- und Sollwert minimiert. (vereinfachte schematische Darstellung) Wenn z.B. die Solltemperatur 10°C sein soll, gibt es immer eine akzeptable Toleranz von z.B. ± 0,3 K. D.h. wenn die Temperatur zwischen 9,7°C und 10,3°C beträgt, müsste der Regler eigentlich in Neutralstellung verharren oder der Soll-Wert sollte dem Ist-Wert entsprechen. Ein stetig regelnder PID-Regler kennt keine Neutralstellung und wenn er keine Abweichung feststellt regelt er trotzdem, bis es wieder eine Abweichung gibt. Wenn nun beim Sollwert von 10°C der Ist-Wert zwischen 9,7°C und 10,0°C liegt, wird der Soll-Wert deshalb verändert auf Ist-Wert plus 0,01K. Wenn der Ist-Wert über 10,0°C aber unter 10,3°C liegt, wird der Sollwert auf Ist-Wert minus 0,01K festgelegt. Da nun innerhalb des Toleranzbereichs die Abweichung von Ist- zu Soll-Wert extrem klein geworden ist, passen sich die Reglerschritte an und der I-Wert wird dadurch manipuliert und beruhigt den Regler. Zunächst wird der Regler nahezu unverändert um den Sollwert von 10°C herum schwingen, aber jedes Mal wenn er sich im Toleranzbereich befindet, bekommt er die Rückmeldung, dass die Abweichung extrem klein ist und seine Regelschritte entsprechend verkleinert werden müssen. Je größer die eingestellte Toleranz ist, desto schneller wird das Schwingen beendet werden. Wenn durch einen äußeren Einfluss sich die Temperatur plötzlich außerhalb des Toleranzbereichs befindet, beträgt der Soll-Wert wieder 10,0°C und der Regler wird die Abweichung schnell ausgleichen, da er als schneller Regler parametriert wurde. Zusammenfassung Je mehr gleichartige Regler auf ein Regelsystem wirken, desto wahrscheinlicher wird das System schwingen. Schwingende Regler sind inakzeptabel; es sollte immer angestrebt werden, dass der Ist-Wert dem Soll-Wert entspricht. Der Messwert (Ist-Wert) sollte sich möglichst unmittelbar nach einer Änderung am Stellglied verändern; um dies zu erreichen ist es regelmäßig sinnvoll nicht den auf den ersten Blick sich aufdrängenden Messwert zu verwenden, sondern einen indirekten oder errechneten Messwert als Ist-Wert in der Regelung zu verarbeiten. Auch wenn besonders hochwertige Regler zusammen mit der Steuerung erworben werden, ist es häufig nicht sinnvoll sie für jede Regelaufgabe zu verwenden. Der dynamische Sollwertgeber, der den I-Anteil des PI(D)-Reglers beeinflusst, hat sich in der Praxis bewährt schwingende Regler schnell zu beruhigen ohne sie „schlafen“ zu schicken. Bei Soll-Werten mit großen Toleranzen (z.B. Ventilstellung-Soll 20% bis 80%) ist ein Step-Regler zu bevorzugen, da er – richtig angewendet – nicht schwingt. Sehr selten ist es wirtschaftlich nicht möglich sehr langsame Regelkreise zu vermeiden; Auf-Neutral-Zu-Regler können hierfür die erste Wahl sein, die bevorzugt mit Stellventilen die mit elektro-motorischen statt mit pneumatischen Membranantrieben kombiniert werden. Künstlicher Intelligenz sollte man nur Aufgaben überlassen, wenn sie bewiesen hat, dass sie mindestens so zuverlässig wie ein Mensch funktioniert. |